بستن
0 محصول
مشاهده سبد خرید

الکتروموتور یا موتور الکتریکی یکی از اجزای مهم در بسیاری از صنایع و تجهیزات است. این وسیله به کمک انرژی الکتریکی، نیروی مکانیکی تولید میکند. الکتروموتورها در انواع مختلفی تولید میشوند که از نظر شکل ساخت، عملکرد، و نوع جریان مصرفی متفاوت هستند.

در سال ۱۸۸۲ نیکولا تسلا اصول میدان مغناطیسی دوار را مطرح کرد و زمینهساز توسعه موتورهای القایی شد. او در ۱۸۸۸ موفق به ثبت اختراع موتور القایی خود شد. گالیلئو فراریس نیز در همان سال بهصورت مستقل، نتایج تحقیقات خود درباره این پدیده را منتشر کرد. بعدها، میخایل اسیبوویچ موتور سه فاز روتور قفسی را طراحی کرد که امروزه پرکاربردترین نوع در صنعت است.
برای انتخاب یک الکتروموتور، چند عامل باید در نظر گرفته شود:
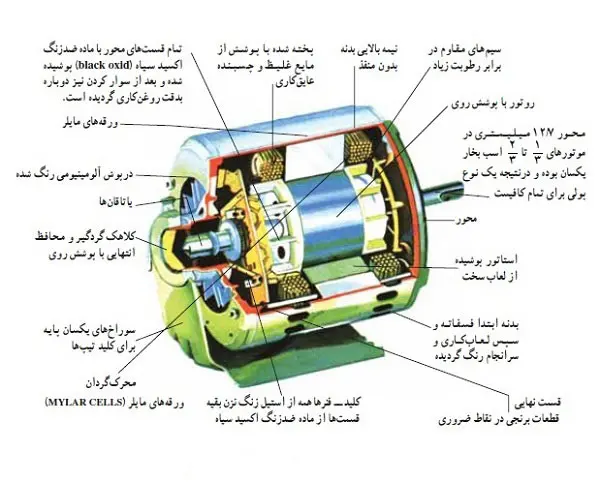
یک موتور الکتریکی ساده از اجزای زیر تشکیل شده است:
موتورهای الکتریکی به دو دسته کلی تقسیم میشوند:
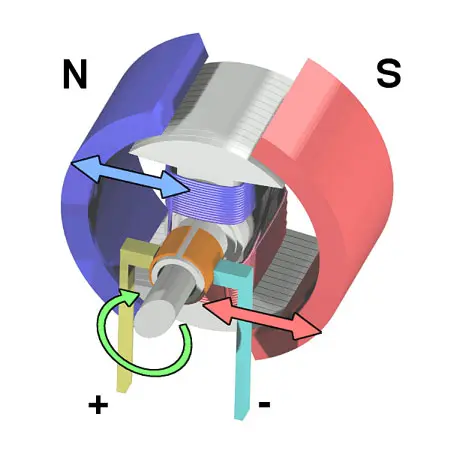
موتورهای DC دارای آرمیچر و کموتاتور هستند. این موتورها معمولاً در مواردی استفاده میشوند که نیاز به کنترل دقیقتری بر سرعت و گشتاور باشد.
دارای گشتاور راهاندازی بالا، مناسب برای جرثقیل، بالابر، پرس ضربهای، مترو، تراموا.
دارای دور ثابت در بار نامی، مناسب برای هواکشهای صنعتی و دمندهها.
ترکیبی از دو نوع بالا، با دو نوع اضافی و نقصانی:
رایجترین نوع موتور در صنعت و خانه، بهویژه موتورهای القایی. این موتورها بهدلیل قیمت پایین، ساخت ساده و دوام بالا، بسیار محبوب هستند.
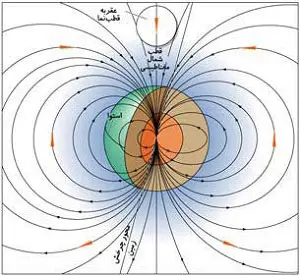
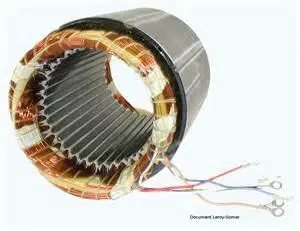
میدان مغناطیسی دوار توسط استاتور ایجاد شده و باعث چرخش روتور میشود. اغلب موتورهای القایی دارای ساختاری ساده اما عملکردی بسیار مؤثر هستند.
الکتروموتورهای AC (جریان متناوب) از پرکاربردترین موتورهای الکتریکی در صنایع مختلف هستند. این موتورها بر اساس نحوه عملکرد، ساختمان روتور و نوع کاربرد به انواع مختلفی تقسیم میشوند. در این مطلب با انواع الکتروموتورهای AC شامل سنکرون، آسنکرون (قفس سنجابی و روتور سیمپیچی) و موتورهای تکفاز و سهفاز آشنا میشویم.
در این نوع موتور، روتور و استاتور هر دو سیمپیچی شدهاند. میدان گردان استاتور با سرعت ثابت (سرعت سنکرون) میچرخد. روتور که توسط جریان DC تغذیه میشود، همزمان با این میدان میچرخد. برای راهاندازی، به یک محرک اولیه نیاز است تا روتور را به سرعت سنکرون برساند.
الکتروموتورهای آسنکرون رایجترین نوع موتورهای AC هستند. این موتورها به دو دسته اصلی تقسیم میشوند:
روتور این موتورها دارای میلههایی از جنس آلومینیوم یا مس است که به صورت مورب در شیارهای آهنی قرار دارند. طراحی مورب میلهها به بهبود عملکرد موتور هنگام استارت کمک میکند.
در این موتورها بهجای میله، روتور سیمپیچی شده و انتهای سیمپیچها به حلقههای لغزنده متصل است. با استفاده از بانکهای مقاومتی (استارتر)، میتوان مقاومت روتور را کنترل کرد.
در این نوع، سه کلاف استاتور وجود دارد که با اختلاف فاز ۱۲۰ درجه نسبت به هم قرار دارند. این موتورها خود راهانداز هستند و در صنایع بزرگ کاربرد فراوانی دارند.
موتورهای تک فاز دارای یک پیچه اصلی و یک پیچه کمکی (برای استارت) هستند. بهدلیل اینکه به تنهایی نمیتوانند میدان مغناطیسی دوار تولید کنند، به یک سیستم آغازگر نیاز دارند.
— اگر بخوای، میتونم همین متن رو برات بهصورت فایل HTML قابل کپی یا بارگذاری هم آماده کنم. بگو فقط کجای سایتت میخوای بزاری (مثلاً صفحه بلاگ یا محصول خاص) تا ساختارش دقیقتر تنظیم کنم.
این نوع موتور نسخه بهبود یافته الکتروموتور فاز شکسته است که با اضافه کردن یک خازن در مدار استارت، گشتاور راهاندازی بیشتری فراهم میکند. استفاده از سیمپیچ ضخیمتر در مدار استارت نیز به افزایش توان راهاندازی کمک میکند.
در این نوع موتور، خازن استارت با یک مقاومت جایگزین شده است. این موتورها زمانی استفاده میشوند که نیاز به گشتاور راهاندازی بالایی وجود ندارد. با وجود هزینه پایینتر، عملکرد آن نسبت به موتورهای استارت خازنی محدودتر است. این مدلها در سیستمهای تسمهای کوچک، پمپها، دمندههای بزرگ و گیربکسها کاربرد دارند.
در این موتورها، یک خازن دائمی به صورت سری با سیمپیچ کمکی قرار دارد. این سیمپیچ کمکی تا رسیدن موتور به سرعت نامی به کار خود ادامه میدهد. خازن دائمی به دلیل طراحی برای عملکرد مداوم، گشتاور راهاندازی پایینتری نسبت به خازنهای استارتی دارد (حدود ۳۰ تا ۱۵۰ درصد گشتاور نامی).
این نوع موتور دارای دو خازن است: یکی خازن استارتی برای افزایش گشتاور در شروع کار و دیگری خازن کارکرد برای بهبود عملکرد پیوسته. خازن استارتی پس از راهاندازی از مدار خارج میشود. این ساختار باعث افزایش بازده و گشتاور اولیه میشود.
این نوع موتور تنها دارای یک سیمپیچ اصلی است و سیمپیچ راهانداز ندارد. بهجای آن از یک حلقه مسی (حلقه سایهدار) برای تولید گشتاور اولیه استفاده میشود. این حلقه باعث ایجاد تأخیر فاز در بخشی از قطب شده و باعث چرخش روتور میشود. کاربرد این موتورها معمولاً در فنهای کوچک، وسایل خانگی و دستگاههای کمبار است.
برای کاربردهایی با توان بالاتر، از الکتروموتورهای سهفاز استفاده میشود. این موتورها با استفاده از اختلاف فاز بین فازهای برق سهفاز، یک میدان مغناطیسی دوار تولید میکنند که باعث چرخش روتور میشود. جریان القایی ایجادشده در روتور، باعث ایجاد یک میدان مغناطیسی ثانویه و چرخش روتور در جهت میدان استاتور میشود.
سرعت روتور همواره کمی کمتر از سرعت میدان مغناطیسی (سرعت سنکرون) است.
این اختلاف سرعت (لغزش) باعث القای جریان در روتور میشود.
سرعت موتور به فرکانس تغذیه و تعداد قطبهای استاتور وابسته است.
پرکاربردترین نوع موتور سهفاز است. روتور آن از میلههای مسی یا آلومینیومی تشکیل شده که به صورت قفس سنجابی در فولاد جاسازی شدهاند. این موتورها بازه وسیعی از توان (از ⅓ تا چند صد اسب بخار) را پوشش میدهند و هزینه نگهداری پایینی دارند.
در این نوع، روتور دارای سیمپیچهایی است که به حلقههای لغزان (Slip Rings) متصلاند. امکان کنترل گشتاور و سرعت با استفاده از مقاومت خارجی فراهم میشود. این موتورها در آسانسورها، نوار نقالهها، کمپرسورها و پرسها استفاده میشوند.
این نوع موتور برای تولید نیروی خطی بهجای گشتاور چرخشی طراحی شده است. عملکرد آن مشابه یک موتور القایی یا پلهای است که باز شده و بهصورت خطی توسعه یافته است. در کاربردهایی مانند قطارهای مغناطیسی و سیستمهای جابهجایی صنعتی کاربرد دارند.
این موتورها از آهنرباهای دائم در روتور و آهنرباهای کنترلشده در استاتور بهره میبرند. بهوسیله پالسهای کنترلی، موقعیت دقیق روتور تنظیم میشود. کاربرد آنها در پرینترها، CNC، رباتیک و سیستمهای موقعیتیاب دقیق است.
روی تمامی الکتروموتورها، پلاکی نصب میشود که اطلاعات فنی موتور روی آن درج شده است. توجه به این اطلاعات برای انتخاب، نصب و بهرهبرداری صحیح از موتور حیاتی است.
اطلاعات کلیدی روی پلاک:
No: شماره مدل موتور
Type: نوع یا مدل فنی موتور
AMPS: جریان نامی موتور
V: ولتاژ کاری مجاز (در ترکیب با نمادهای ستاره (Y) و مثلث (Δ))
Hz: فرکانس کاری (معمولاً 50 یا 60 هرتز)
RPM: دور موتور بر حسب دور در دقیقه
KW: توان نامی موتور
Date: تاریخ ساخت
نکته: ولتاژ کاری بسته به نوع اتصال (ستاره یا مثلث) ممکن است متفاوت باشد. برای مثال، 380/220V به معنی اتصال مثلث در ولتاژ پایینتر و ستاره در ولتاژ بالاتر است.
کد IP نشاندهنده میزان محافظت موتور در برابر گردوغبار و رطوبت است. این کد شامل دو رقم است:
| رقم | توضیح |
|---|---|
| 0 | بدون حفاظت |
| 1 | در برابر دست یا اجسام بزرگ |
| 2 | در برابر انگشتان |
| 3 | ابزارهای کوچک |
| 4 | سیم و ابزارهای نازک |
| 5 | حفاظت در برابر گرد و غبار مضر |
| 6 | کاملاً ضد گرد و غبار |
| رقم | توضیح |
|---|---|
| 0 | بدون محافظت |
| 1 | چکیدن آب از بالا |
| 2 | چکیدن با زاویه تا 15 درجه |
| 3 | ترشح آب |
| 4 | پاشش آب |
| 5 | پاشش شدید آب |
| 6 | سیلاب |
| 7 | غوطهوری موقت |
| 8 | غوطهوری دائم |
نکته: اگر فقط یکی از دو ویژگی IP اهمیت داشته باشد، مقدار دیگر با X نمایش داده میشود (مثلاً IPX4 یا IP2X).
با شناخت دقیق انواع، کاربردها و نکات انتخاب و نگهداری آنها، میتوانید بهترین دستگاه را برای نیاز خود از فروشگاه مهام فیدار انتخاب کنید و از عملکرد بهینه آن بهرهمند شوید.






دیدگاه های نامرتبط به مطلب تایید نخواهد شد.
از درج دیدگاه های تکراری پرهیز نمایید.